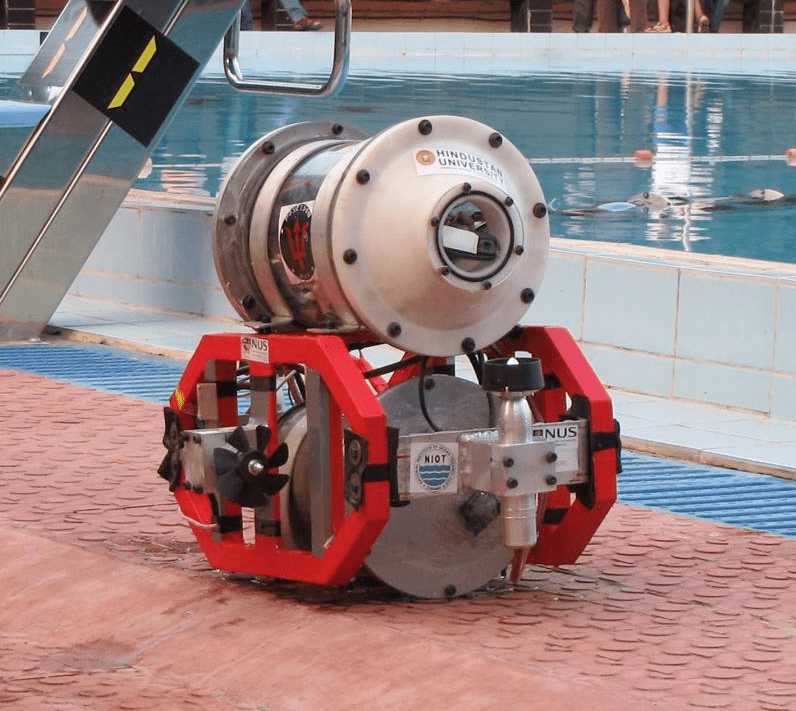
POSEIDON is an autonomous underwater vehicle (AUV) designed and built by a team of 5 undergraduate students at Hindustan University during the academic year of 2014-2015.
As a lone software team member was responsible for creating an Autonomous system called as SOFTY which would handle various tasks performed by the AUV.
Using Nvidia Tegrak1 processor on board with Arduino and two web cameras, the system has to move over some obstacles, avoid some, fire a torpedo, move towards a pinger, etc.
It was a closed loop control where the data from IMU and other sensors (Mainly GY80) was compiled with the images from the two cams to localize the AUV and also move it.
The microprocessor was running Ubuntu 14.04 customised for TK1 with OpenCV for image processing.
ROS was the base stack for all transfer of controls and data between various levels.
Each level has it own actions to perform.
The higher the level, the more complex decision is made.
Lower levels receive these decisions and perform the physical actions.
It was developed for participation in Singapore Autonomous underwater vehicle SAUVC'15 conducted by IEEE association of Singapore and NUS at Singapore Polytechnic.