(Urban + Mobility) maven,
Tech Product strategist,
And a Dreamer

Select Courses: Design Principals & System Design, Artificial Intelligence & Expert Systems, Mobile Computing, Cryptogrpahy & Network Security, Internet Programming, Design Lab, System Software.
Thesis: Extraction and Modelling of Defence HR Dataset to Recommend on Transfer of Service Personals
Languages: C, Python, Angular, Ruby-on Rails, Node JS, PHP, JavaScript, Native Android, Cordova.
Platforms: GCP, AWS, Heroku, SoftLayer(IBM), Azure.
Database: SQL, PostgreSQL, MongoDB, Cassandra, Oracle, DynamoDB.
Packages: TensorFlow & lite, PyTorch, FastAI, H2O, Keras, Pandas, Scikit-learn.
Tools/platform: Jupyter, Paperspace, AWS, Google Collab.
Software: Robot Operating System(ROS), QT, Processing, OpenCV, Arduino, MATLAB, Unity. Hardware: Arduino, Raspberry pi, NVidia JTK1 and Intel microprocessors.
Sofwares/Services: QGIS, OSM, Mapbox, USGS Earthexplorer, Leaflet, Carto.
Packages: EO-Learn, Shapely, GDAL, Geopandas, PyProj, Sentinelsat.
ThreeJS, D3, ARjs, GLjs
Photoshop, Sketch, Avocode, QT Designer, Invision Studio.
The paper presents the design for a unmanned space exploration vehicle for using on Martian terrain. The main focus is on the basic building blocks of the system from mechanical to software and various applications on the Martian terrain.
The paper describes about the design, build, functionality and testing procedures applied to Hindustan University's first Autonomous Underwater Vehicle - Poseidon. It also explains about the suite of sensor for controls and maneuver with the software system in development.
An Intelligent Driver Assistance cum Warning Device which uses GPS, Sensors, Wi-Fi Smartphone among the vehicles to alert the driver about the impending accidents to provide a safest driving on the typical road ways.
The proposed concept is a Driver Assistance Device with a transceiver among vehicles to provide safest driving on the typical roadways, by identifying and alerting the driver about events such as sudden slow/brake, broken down vehicle, invisible spot alert, lane change alert, intersection alert, left/right turn assist.
- Organised by the National Institution for Transforming India (NITI aayog) under Government of India.
- Awarded for Mobility Products Designed and Developed at Flytta.
- Awarded for Business, Operations and Technology products of Flytta
- The application's idea to release was in 5 hours in the hackathon.
- Adjudged best in accessibilty and use cases with profitable metrix.
- Used ROS for traversing and ground control station with IMU.
- Had extra module to understand obstacle and mineral object detection.
- The rover was semi autonomous while the competition accepts ground station control.
- As RA, built the communication network & User Interface.
- Data Science & Engineering
- Technology Domains - Geospatial, Medical & Compliance.
- Consulting for product architecture and solution.
- Advising logistics startups on product & team building.
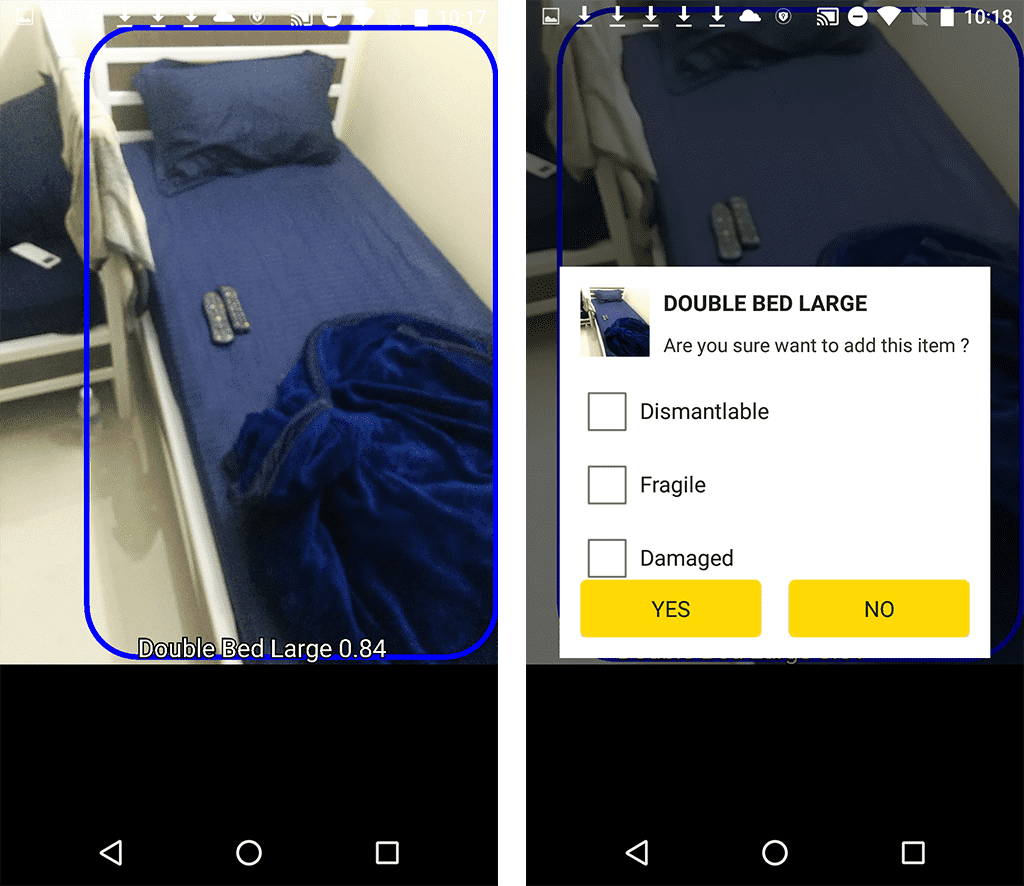
- AI Enabled Enterprise Relocation & Logistic Saas Platform
- Built products used by fortune 500 clients.
- Lead R&D on multiple IP Solutions.
- Involved in overall company scaleup including brand building, operations, finance and marketing.
- Lead the AI-6 Weekly Study Group at Hyderabad.
- Coordinated on structured open course for the practical approach to Artificial Intelligence.
- Part-time member of the R&D team in building products for HR domain.
- Built two products, an online programming contest platform and a visualisation tool for job boards.
- Build and shipped two version of Mars rover to take part at University rover challenge at The Mars Desert Research Station, Utah.
- As the Technical team lead, conducted various R&D works with different technologies to build and implement various modules of the rover.
- Had a team of 10 people working along with me in various technologies like OpenCV to implement semi-guided rover transverse, ROS for ground station control, Repeater wifi antenna system for communication channel and various other life science, atmospheric and location centric sensor system.
- The team worked on building an Autonomous underwater vehicle to perform complex tasks without human inputs and interventions.
- I was responsible to build and train the AUV's imaging capabilities to map the environment underwater in a 3D structure using ROS.
- The AUV was designed to perform various tasks like traversing the path autonomously and missions like torpedo releasing, material droppings.
- Graaby is Universal Rewards program and has the potential to support an entire ecosystem of amazing simplifying technologies.
- I worked on implementing the search feature in the consumer application.
- Captain & Part of Multiple Teams in various Senior Club Cups.
- Represented State Team for National Championships.
- Part of University Team in National & International Championships.
- High School Captain & Club Coach.
- Teaching Assistance for Python, Java, Microprocessor and Entrepreneurship classes.
- Research Assistance for various funded faculty research projects.
- Guest Speaker on Ethical Hacking, Embedded System and Artifical Intelligence.
- Organiser for various departmental & University Events.
- Web-admin for Department & University.
- Part of Department Student Council.
Email: gokul [dot] 0369 [at] gmail [dot] com
Phone: +91 8220869194
Skype: gokul.vasan
Telegram: @gok03